
I am a Lecturer in Robotics at Middlesex University. Previously, I was a Postdoctoral Reseacher in Robotics at the University of Oxford, working with Professor Ioannis Havoutis at the Oxford Robotics Institute. I completed my PhD in Engineering Science at the Dynamic Robot Systems Group in 2025, where my research focused on achieving cost-efficient and reachability-aware task and motion planning solutions. My work explored hierarchical optimization, sampling-based techniques, and foundation models for robotic planning in both domestic and industrial settings. Broadly, my interests lie in automation for mobile manipulators, including wheeled and legged platforms.
Before, I pursued my Master’s degree in Computer Science (Artificial Intelligence) at the University of Nottingham. During this time, I worked with Dr. Ayse Kucukyilmaz to develop a haptic telemanipulation system, where I examined both reinforcement learning and trajectory planning with learning from demonstration.
I am deeply passionate about robotics and aspire to bring robots closer to real-world applications, spanning industrial and domestic tasks. In addition to my research, I am a reviewer for leading robotics conferences and journals, including ICRA, IROS, and RA-L.
Feel free to reach out for collaborations via my email: ktien@robots.ox.ac.uk
I am having a fully-funded PhD studentship for a UK student. More information available at: https://www.jobs.ac.uk/job/DQD359/phd-studentship-exploring-robotics-in-architecture
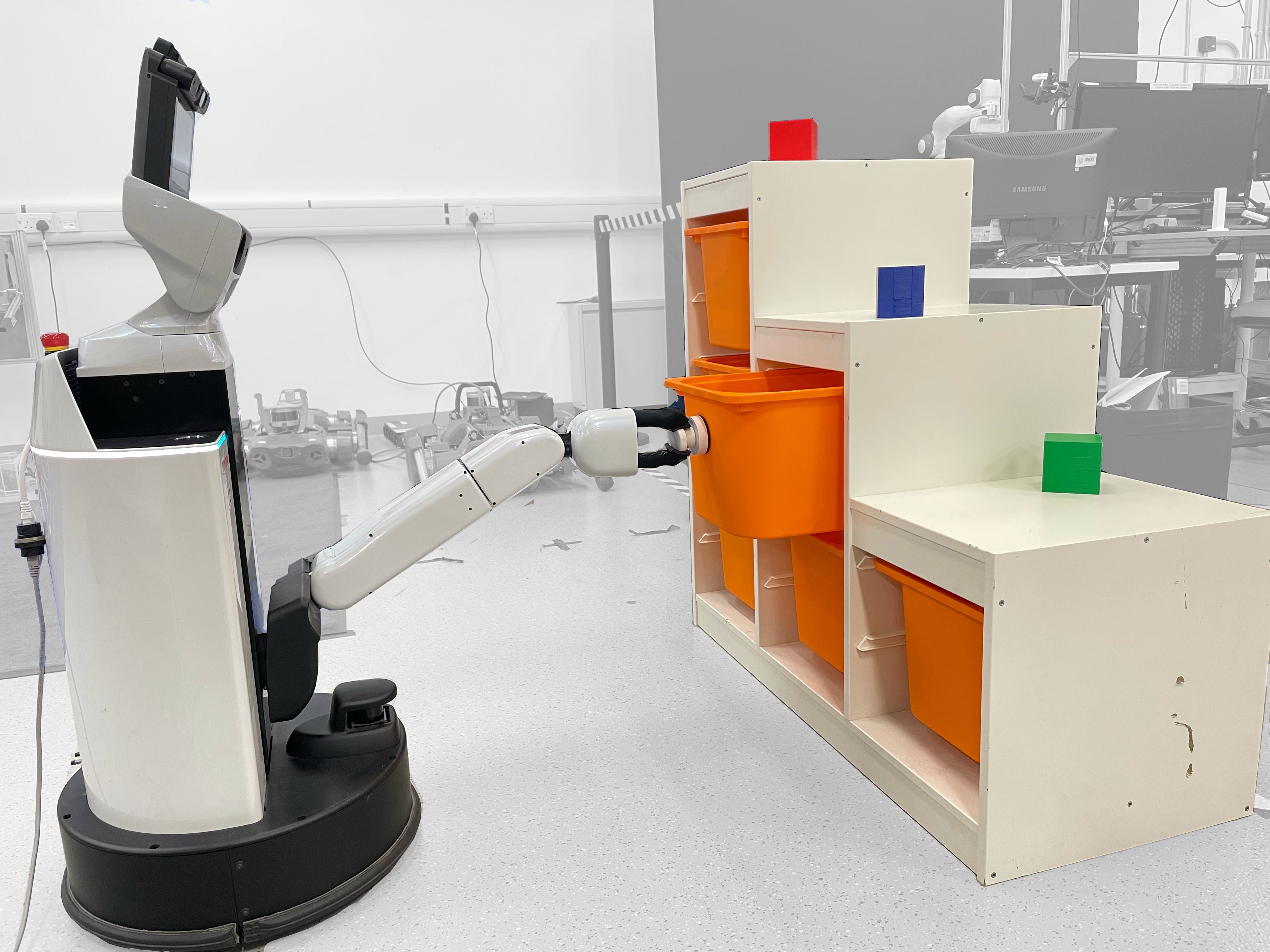
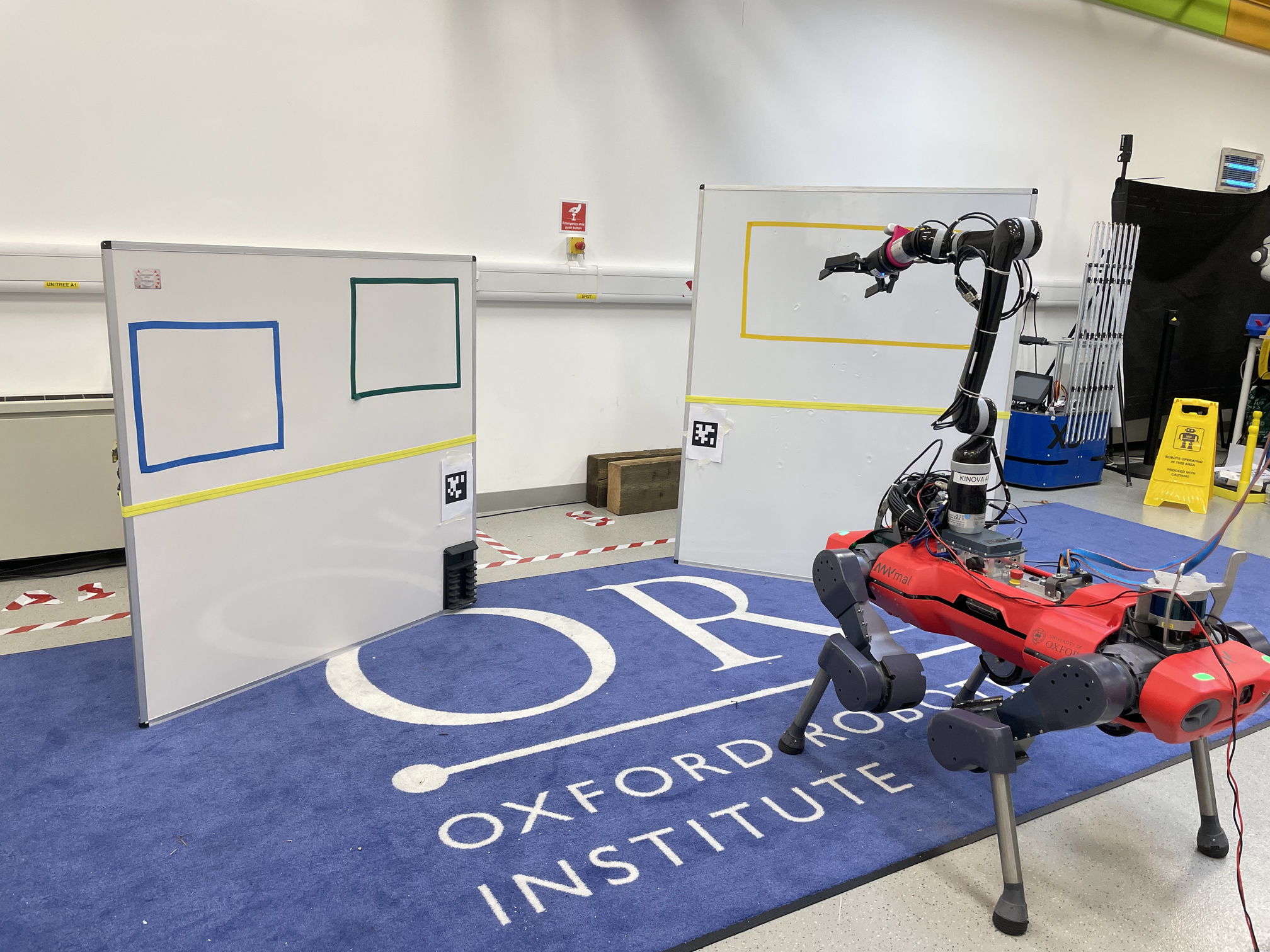
Robot platforms I had experience with..
|
|

|

|

|

|